

Ever since I unpacked my Oculus Rift DK1 and perhaps even more so now that I've spent a few days trying to get more than a handful of demos to work on my DK2, I've wanted to be able to touch things in virtual reality. Not just click a mouse or press a button to initiate picking something up, but really touch it. Grab it with my hand and feel like that's what I'm doing. The Razer Hydra offers some functionality there, but it's far from perfect. Dextra Robotics solution however, the Dexmo hand mount, could very well achieve that goal and soon.
The Dexmo is a spider-like, open plan glove that attaches to the back of your hand, each of your fingers and your thumb and as you grasp items in the game world, it will deliver appropriate force feedback.
“On the thumb and the index finger exoskeleton there are two additional pieces of hardware that we invested a lot of time developing, called the force feedback unit,” said Dextra Robotics' spokesperson in their AMA. “…which is essentially a miniaturized gear disk breaking system. It works like this: when the avatar you are controlling hits an digital object, a signal is sent back via our SDK to Dexmo F2 and the small actuators actuates, brakes the joint and locks the exoskeleton. When you further bend your finger inwards, a normal force will be created on your fingertip.”
When combined with the STEM limb tracking controller, it should essentially allow for full hand tracking and tactile feedback in the virtual world. There's also the potential for it to be use for motion tracking for game and movie characters.
At this time, the Dexmo is in the early stages of development and can only do on or off force, there's no regulation so soft touches or heavy impacts are out of the question. However future versions could be improved and Dextra wants you guys to help, so it's starting a Kickstarter in October.
KitGuru Says: Of course you still look like a blind spider person to your friends and family. But we can pick things up in the game you guys. 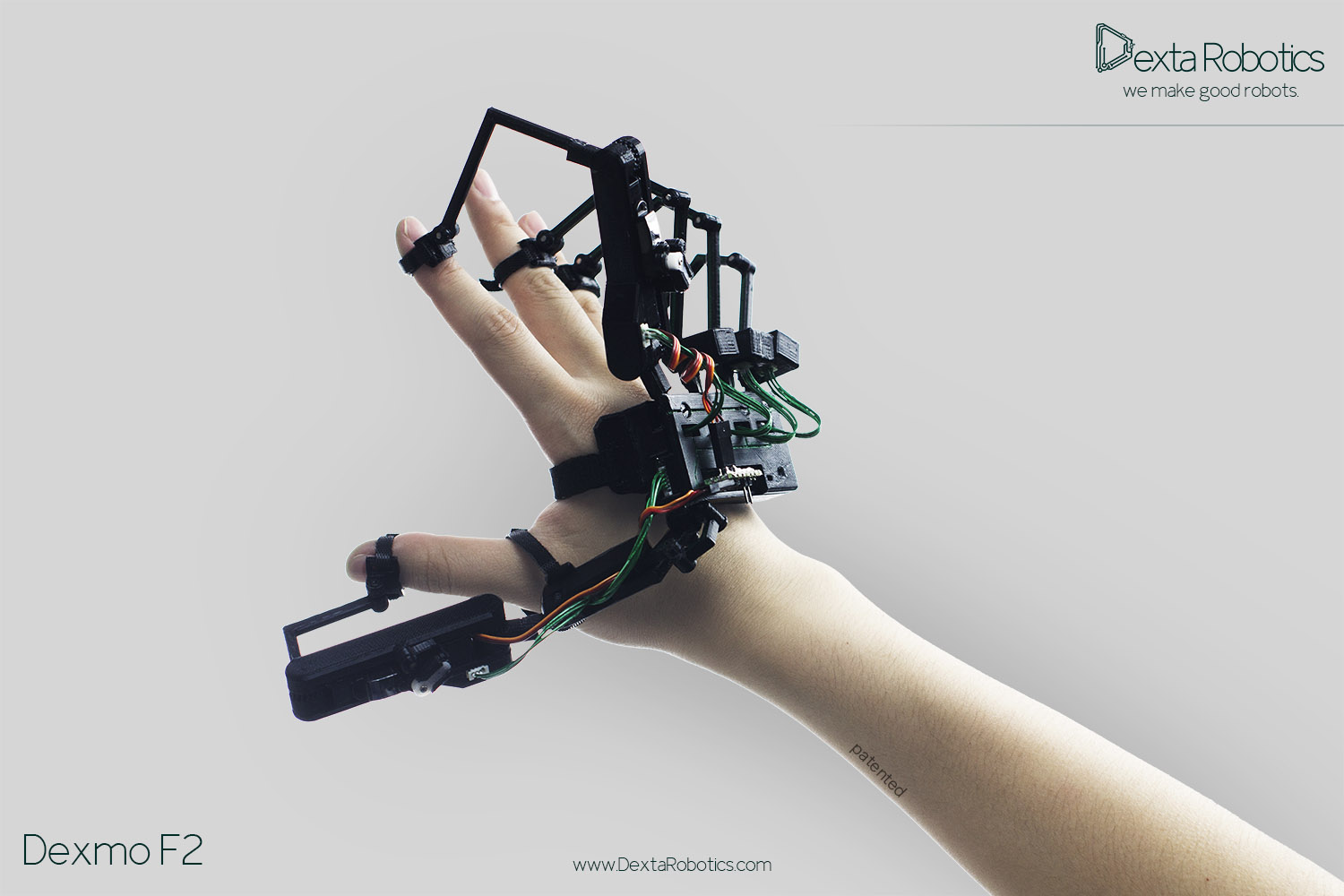

I vote for an exoskeleton over the torso and out to the arms 😛
And then it glitches and breaks a finger with a vertical yank D:
How would it do that? The actuators only put the brakes on the joints. It doesn’t actually push back at you — except in the Newtonian sense.
He made a joke Sheldon… BAZINGA!
I’ve seen about 20 people say the same thing, so it’s worth pointing out. But I’ll try to use smaller words next time — dumb it down a little closer to Big Bang-fan level for you.
I’m not even going to spoil your fantasy. You are by far the most intelligent person alive. The quality you show in copy pasting is something worthy of Wikipedia.
Leave me alone, grow a sense of humor and keep in mind that the lack of social interaction can lead to retardness.